Olin Aero
This work is ongoing and will fill with additional content in the future.
As a member of the Mechanical subteam for Olin Aero, I am designing
internal structures for our vertical takeoff and landing (VTOL) aircraft, which will compete in this
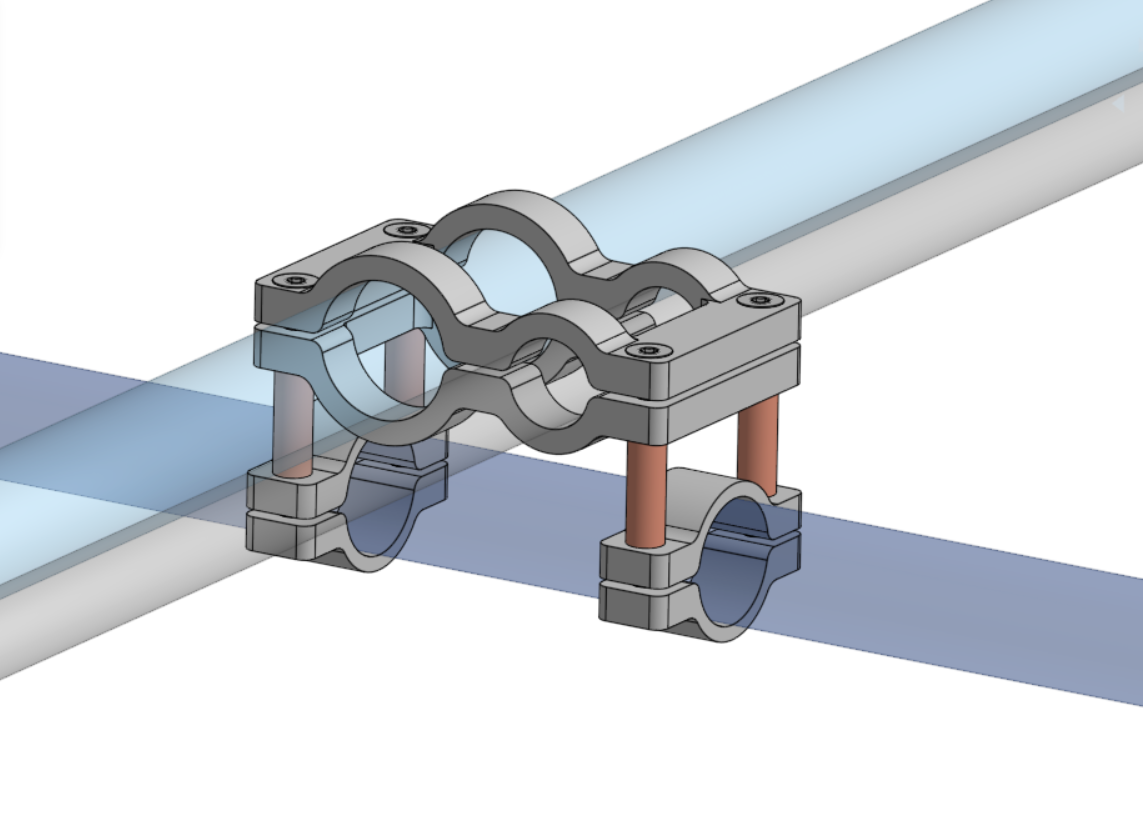
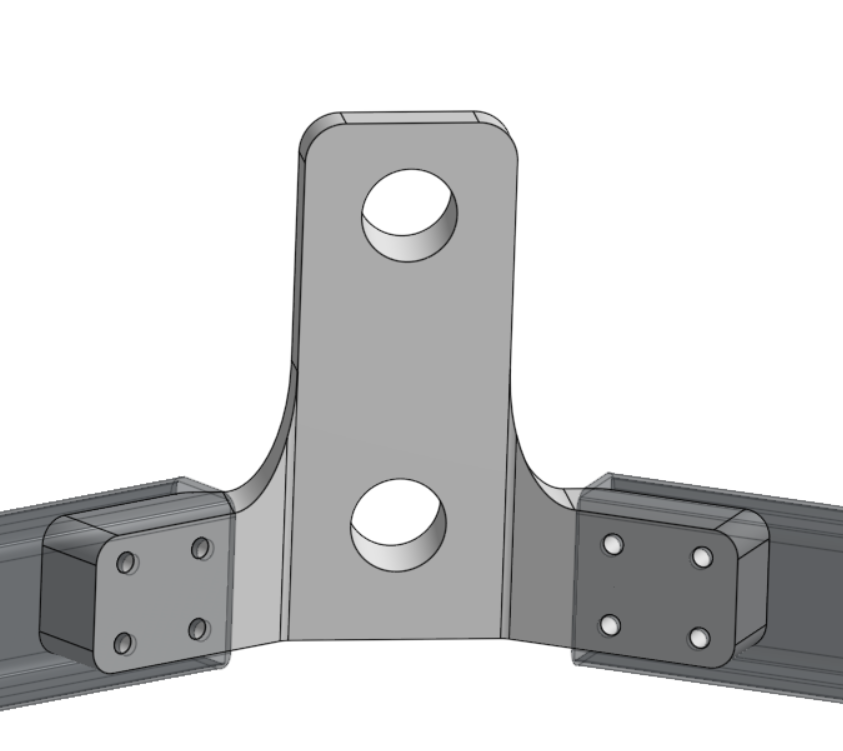
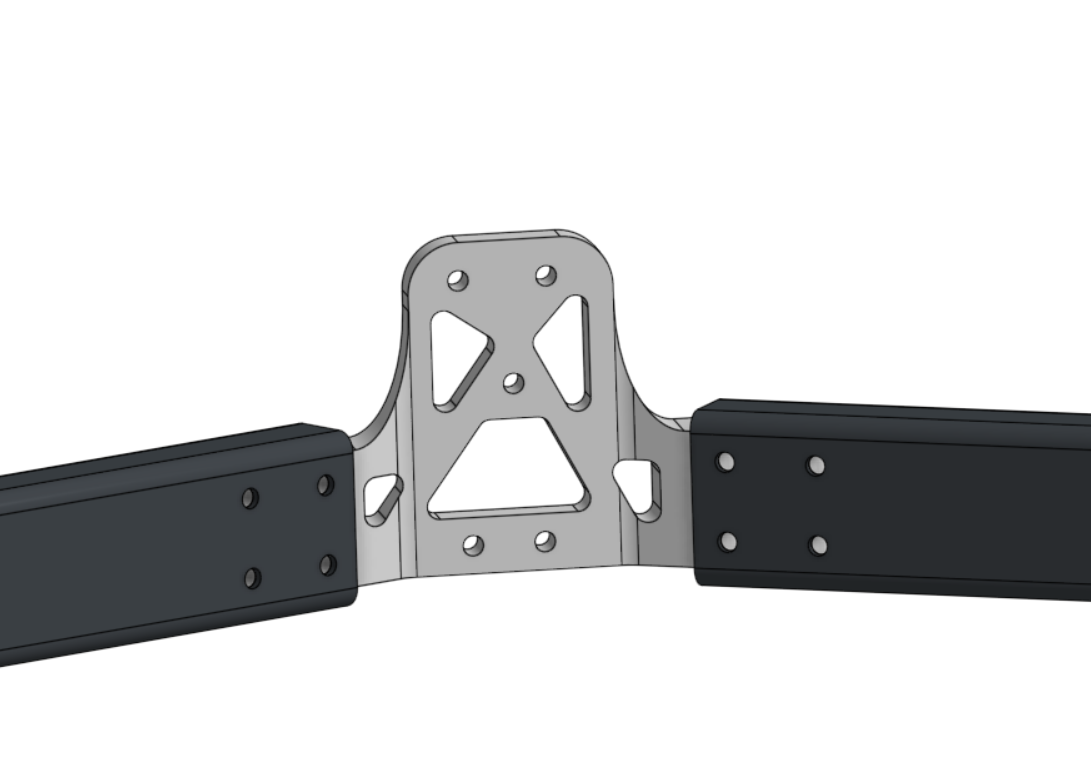
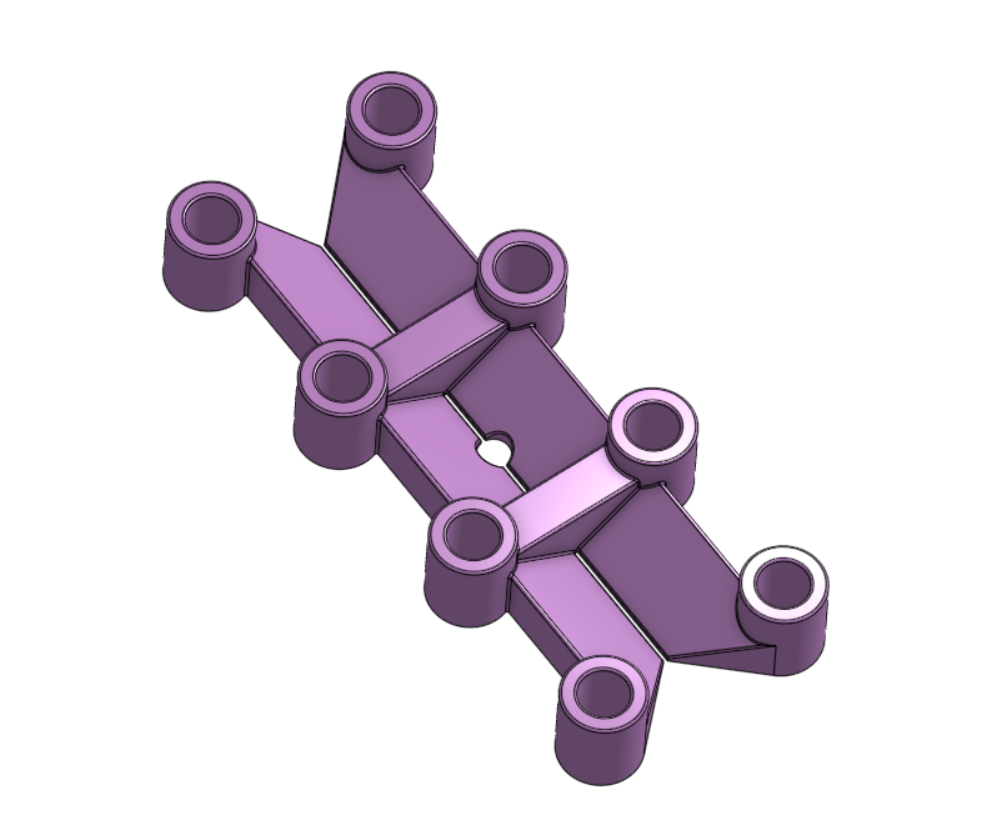
year's national SUAS competition. I am solely responsible for the Motor Junction: a CNC-milled aluminum
component that connects the fuselage to the motors via carbon-fiber rectangular tubes. This part sits at
the intersection of structural performance, cost, and manufacturability, and its design is tightly coupled
to the carbon-fiber tubing available on the market.
A key challenge in this design was the tight coupling between the aluminum motor junction and the
commercially available carbon-fiber tubing. Each tube option varied in stiffness, strength, wall thickness,
and cost, directly affecting the required aluminum geometry and interface features. At the same time,
changes to the aluminum design altered load paths and system-level behavior, creating a "chicken-and-egg"
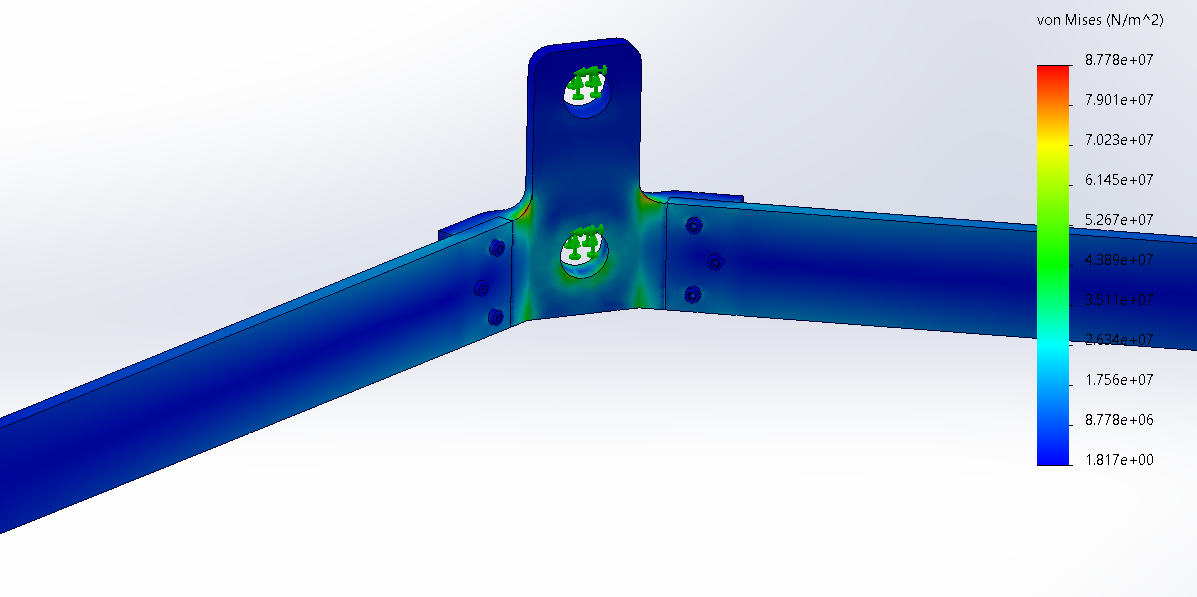
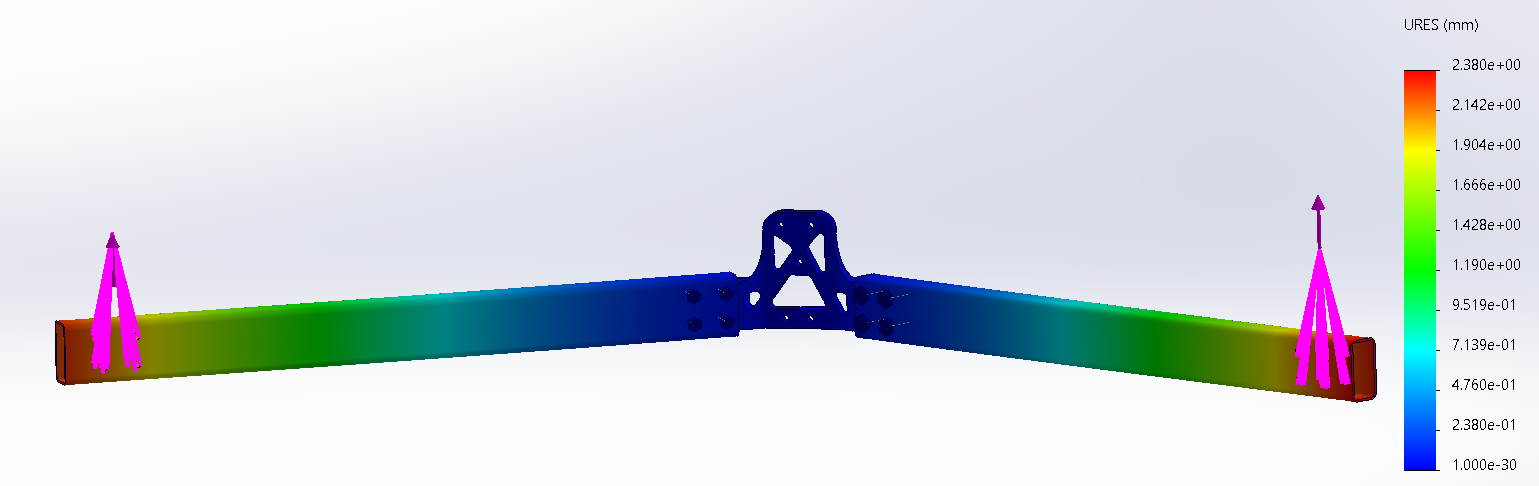
problem where neither component could be finalized independently. To resolve this, I iteratively modeled
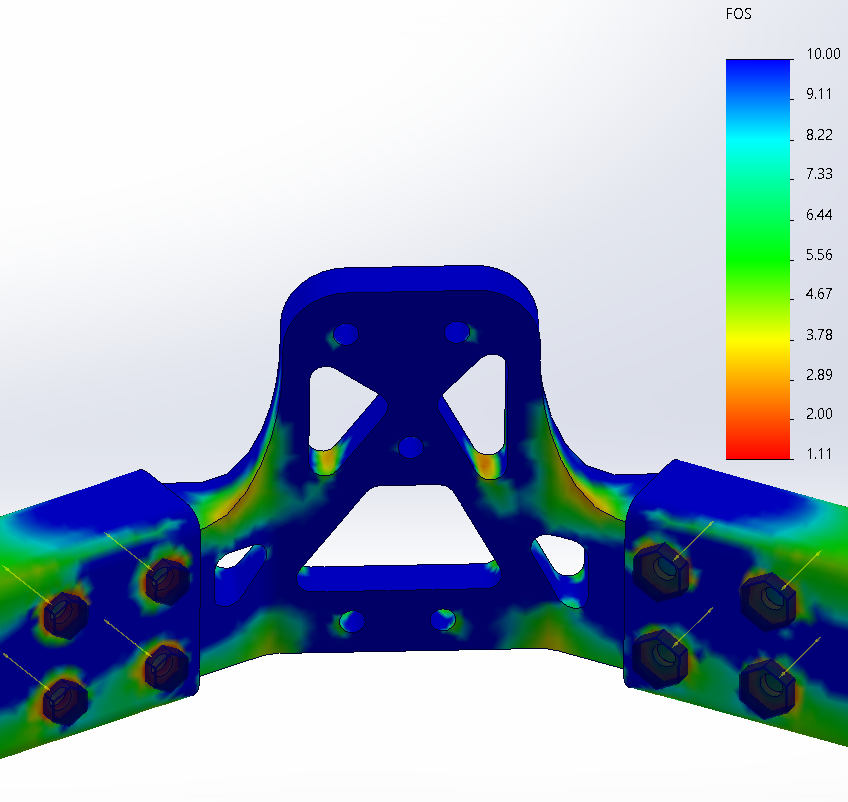
candidate tube options, redesigned the aluminum interfaces, and used SolidWorks FEA to evaluate strength,
stiffness, and resonance of the combined system until a lightweight, strong, and cost-effective solution
was identified.
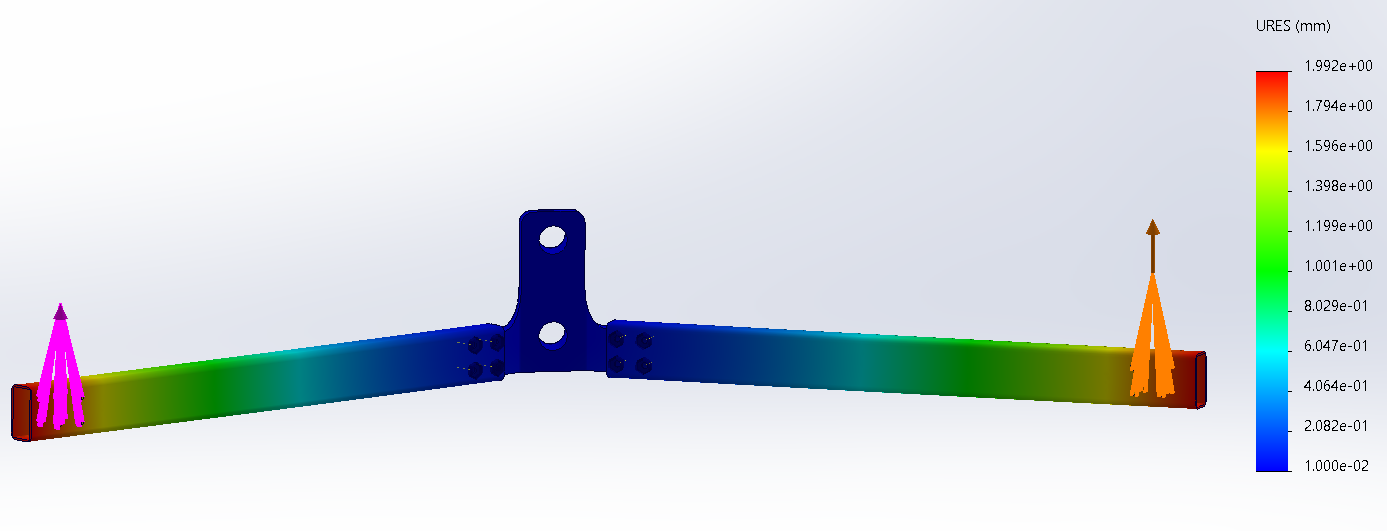
The final design was validated in SolidWorks to withstand worst-case propeller thrust, propeller reaction torque,
and dynamic loading without resonance issues. Currently, I am using Fusion 360 CAM to generate machining toolpaths
for production. This project is strengthening my understanding of coupled structural design, simulation-driven
iteration, and precision manufacturing in aerospace systems.
This work is ongoing and will fill with additional content in the future.